
Control theory Application Group
About Control theory Application Group (CAG) 1. Eco-friendly vehicle design and control (1) EPS(Electric Power Steering) system - Target steering torque feedback controller - Steering feel generation logic (2) PMSM control - Robust control based on DOB (disturbance observer) - Field weakening control&nbs…
EPS(Electric power steering) system
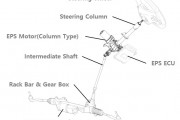
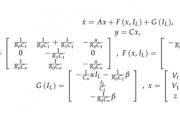
EPS(Electric Power Steering) system Electric Power Steering(EPS) system is a motor supported power steering system that helps provide the driver with a lightweight and convenient steering feel. Because the steering system interacts with human hands, which can be sensitive, designing a good controller is subtle and challenging problem. We focus on all process of controller des…
Battery management systemState of Charge (SOC) Estimation Method for Lithium-ion Battery CellThe SOC representing the amount of charge in the battery cell is the most important factor because it directly relates to the number of miles that an EV can travel. Unlike the terminal voltage and current, there is no way to measure the SOC directly. Therefore, there should be an adva…
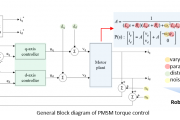
PMSM (Permanent-Magnet Synchronous Motor) Control Robust control based on DOB (Disturbance Observer) Among various types of motors, the permanent-magnet-synchronous motor (PMSM) is dominating for high performance applications due to its high energy-volume ratio, low noise, and durability. Our research is about how to control a PMSM more efficiently and precisely. Es…

Autonomous vehicle detection and tracking
Autonomous Vehicle Platform and MSC-RAD4R Dataset When researching autonomous driving, datasets are essential. There are various types of open-source datasets such as KITTI and nuScenes, but there are limitations in utilizing these datasets. This is because the environment for building open-source datasets and the operating environment of specific platforms are different. For this reason…
Autonomous vehicle motion planning
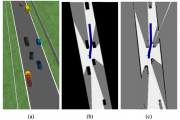
Occupancy Grid based Model Predictive Control Mathematically modeling the surrounding environment is an essential part of motion planning for autonomous driving. However, this process becomes very difficult as the environment becomes more irregular and complex. In this regard, “Occupancy Grid” has several advantages. An occupancy grid is a representation of the environment as a grid…
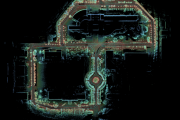
Building HD map for Autonomous Driving For autonomous driving, a map is essential for global path planning. In particular, it is important to create a map that includes road and lane information, such as an HD map or Lane(Vector) map, for assisting with lane tracking and localization. At the MSC research laboratory, a HD map is built in the KAIST Mun-ji campus based o…

About SRG... 1. Quadruped Robot - Nonlinear Model Predictive Control - Dual Locomotion Pipe Inspection Robot - Foot Swing Trajectory Planner - Visual-Inertial External Wrench Estimation - Force Torque Sensor 2. Prosthetic Hand System - Du…

Quadruped Robot Each leg of the quadruped robot consists of three joints (Hip Roll, Hip Pitch, Knee Pitch) and has a total of 12 degrees of freedom, so it has degrees of freedom suitable for walking both flat and uneven terrain. Each joint is composed of a brushless DC motor and low gear ratio, and a timing belt system is applied to reduce moment of inertia of the driving l…

Developing a Prosthetic Robot hand is one of the major research area in our laboratory. There have been continuous efforts on developing the anthropomorphic robot hands for various purposes either in the academy and the industry. Among many, considering a number of upper limb amputees, much attention has been paid to the prosthetic robot hands. However, it still has many limitation …